Honeybee Robotics celebrates 300 total excavations on Mars
Honeybee Robotics Spacecraft Mechanisms Corporation reported this week that its tools on the last three generations of NASA’s Mars landers have reached a milestone, collectively completing 300 excavations of Martian dirt and rocks. In total, Honeybee’s four contact science tools have moved approximately 450 cc’s of material. According to the company:
Over the last decade, Honeybee Robotics tools have accomplished a series of firsts for contact science and exploration on Mars. The Rock Abrasion Tools aboard the Mars Exploration Rovers Spirit and Opportunity were the first tools ever to access the interior of rocks on Mars, starting in 2004. On the 2007 Phoenix Mars Lander, Honeybee’s Icy Soil Acquisition Device (aka the “Phoenix Scoop”) was the first tool to interact with the vast deposits of water ice in the Martian polar regions. Earlier this year, the Dust Removal Tool on the Mars Science Laboratory Curiosity completed its first dusting of a Martian rock in Gale Crater, once the site of a former lakebed or river.
Opportunity, which was originally launched in the summer of 2003, remains active during its tenth year on Mars. Likewise, Honeybee’s Rock Abrasion Tool is still going strong, having completed its 47th grind in July. Mission lead scientist Steve Squyres called Opportunity’s recent exploration “one of the most technically challenging and one of the most scientifically rewarding targets of our whole mission.”
Honeybee is currently developing drills and sample acquisition architectures for the Mars 2020 mission, which is meant to address key questions about the potential for life on Mars. Mars 2020 could be the first step for a Mars “sample return” mission that would actually bring rock samples back to Earth for analysis.
A sample concept for the Mars 2020 mission architecture can be found here.
[ photo courtesy of Honeybee Robotics ]
Newly published research showcases “ethorobotics”
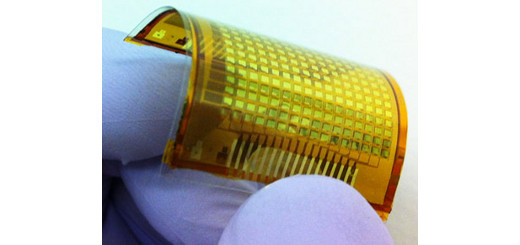
New e-skin creates paper-thin surface that lights to the touch

Shutdown will delay NHTSA’s vehicle-to-vehicle research
About The Author
Mike Davin
Mike Davin is passionate about business and robotics. In addition to editing The Business of Robotics, he is on the advisory board for the Robotics Alley Conference & Expo. He also serves on the executive committee of AUVSI Twin Cities as communications chair. Before he covered robots, he was senior editor of Boating Industry magazine as well as online editor of its sister publication, Powersports Business.