Honeybee Robotics systems aim to revive dead satellites
When your car breaks down, you generally don’t chalk it up as a total loss and leave it for dead on the side of the road. However, that’s essentially what happens when a communications satellite fails in orbit 22,000 miles above the Earth, where thousands of such devices now float as space debris.
Many of these satellites still have usable — but currently inaccessible — components such as antennas and solar arrays. DARPA’s Phoenix program aims to do a little space recycling by developing technology to re-use these still-working parts. The program is creating a new class of “satlets” that can be sent into orbit (either on their own or as a ride-along with a commercial satellite) and attach to the antenna of a non-functional satellite to create a new system.
As part of the project, Honeybee Robotics Spacecraft Mechanisms Corporation reported today that it has started to develop flight models of its telerobotic end effectors for the program. Honeybee is making the grippers and manipulators that will dock the DARPA Phoenix servicer with a satellite and attach the satlets to provide power, communications and control.
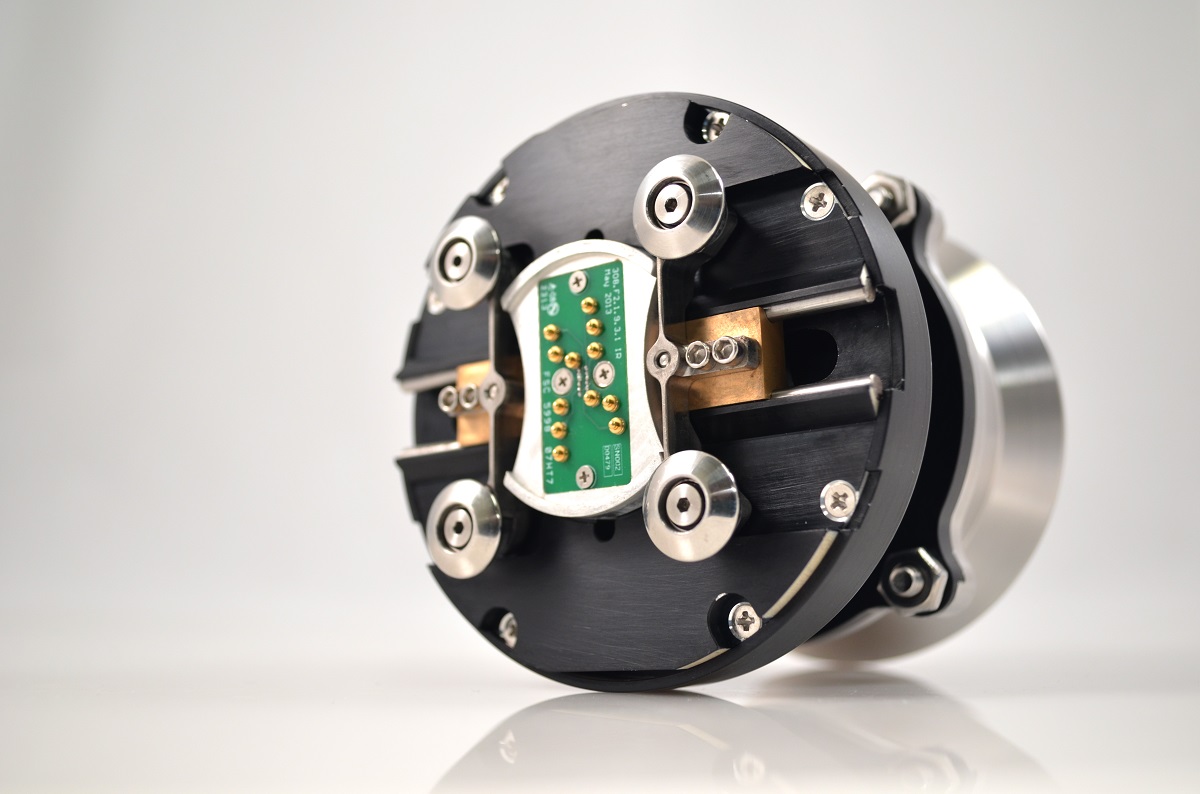
The company is developing two flight subsystems. The Universal Gripper Anchor, or UGA, will be mounted onto the structural elements of the retired satellite’s aperture (antenna) by the servicer to create a “stable, secure platform for the satlet modules.” The Satlet Gripper Tool, or SGT, is a new end effector for securing and manipulating the satlets using the servicing satellite’s robotic arms. The SGT also incorporates a patent-pending multi-channel electromechanical interface that will enable the satlets to communicate with each other.

How the system works is somewhat technical, but John Abrashkin, director of business development at Honeybee Robotics, explained it to The Business of Robotics like this:
The servicing module positions the Universal Gripper Anchor at the boom connecting the old satellite bus to the antenna that DARPA is repurposing, and it clamps down. The antenna is removed, leaving just the gripper and antenna as the nucleus of the new satellite.
Then, our Satlet Gripper Tool (positioned on the end of one of the robotic arms) acts as a specialized single-actuator pick-and-place manipulator to grab satlets from an array mounted on the servicing module, and place them in one of the onmidirectional ports on the Universal Gripper Anchor. Each satlet, whether for GNC, communications, power, etc, has the same electromechanical interface. The satlets have a male end and a female end: the female end (facing out on the array) is manipulated by the Satlet Gripper Tool; the male end releases its hold on the array platform; the Satlet Gripper Tool is positioned by the arm such that the satlet is over one of the interfaces of the Universal Gripper Anchor; and the satlet actuates its anchoring mechanism to connect with the Universal Gripper Anchor port.
A demonstration mission is targeted for 2016 or 2017.
[ photos courtesy of Honeybee Robotics ]
Ohio/Indiana UAS test center to host NASA-backed contest

NASA builds its Robonaut legs, pulls back curtain on “Valkyrie”

AeroVironment, Eurocopter evaluating joint opportunities
About The Author
Mike Davin
Mike Davin is passionate about business and robotics. In addition to editing The Business of Robotics, he is on the advisory board for the Robotics Alley Conference & Expo. He also serves on the executive committee of AUVSI Twin Cities as communications chair. Before he covered robots, he was senior editor of Boating Industry magazine as well as online editor of its sister publication, Powersports Business.