What we know about the other DARPA challenge robots
Last week, DARPA and Boston Dynamics unveiled Atlas, the humanoid robot that seven lucky teams won the right to program for the DARPA Robotics Challenge Trials in December. They will be competing against a group of teams that created their own search-and-rescue robots, which remain shrouded in considerably more mystery.
As we near the competition, however, things are coming into focus. Six of the teams building their own robot are being partially funded by DARPA, and we learned who they are last week. At this point, we’ve also seen glimpses of most of the entries — although the teams will continue to refine them over the coming months. So far, none of them could stand up to the gigantic, monster-smashing robots of last weekend’s film Pacific Rim, but they’re still pretty cool. We’ve rounded up what we know so far below.
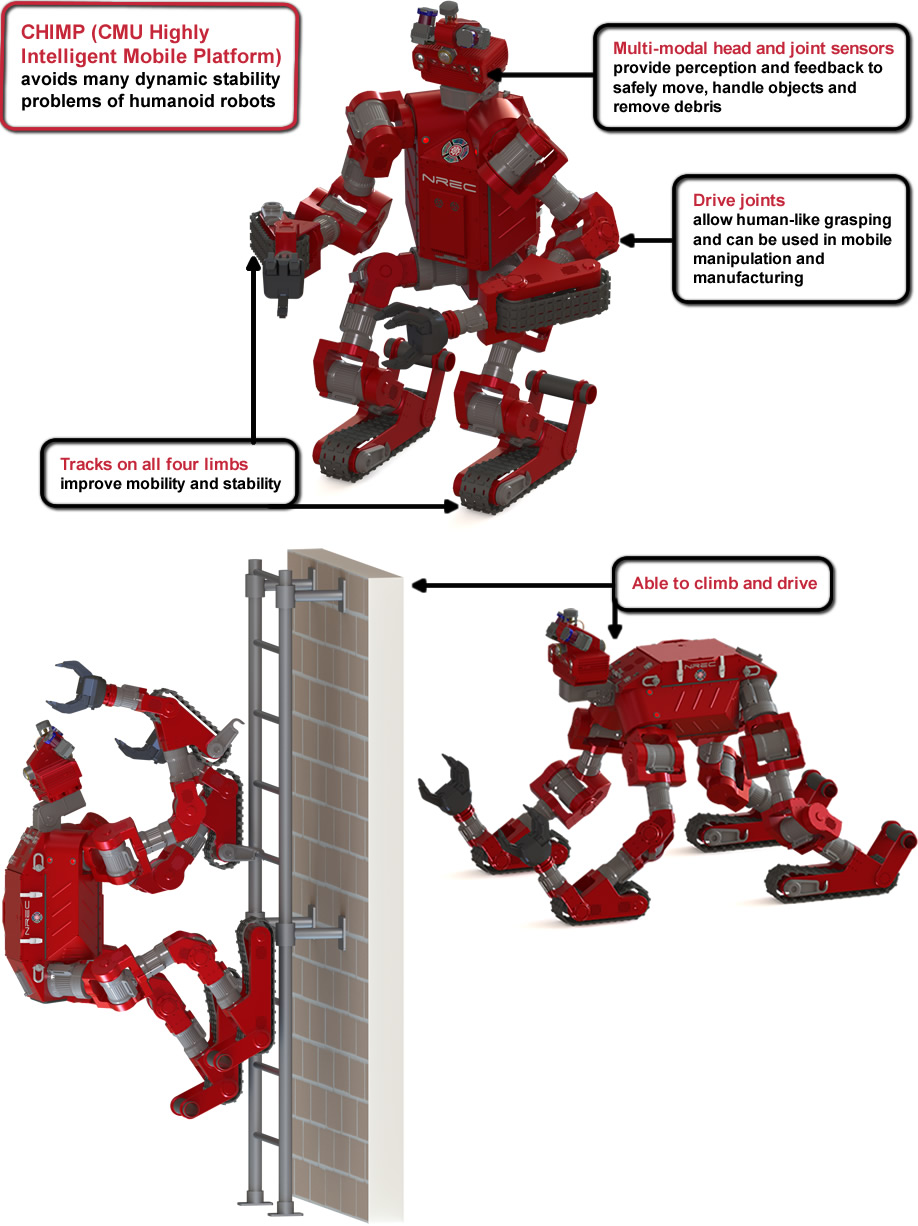
CHIMP from Carnegie Mellon’s National Robotics Engineering Center
CHIMP, which stands for CMU Highly Intelligent Mobile Platform, has a simian-sounding appearance and name, but it actually moves more like a tank. The team’s novel approach has the robot using treads for locomotion. Typically it will be down on all fours, but it can ride on just two tracks to complete certain operations.
HUBO from Drexel University
The lead project investigator on Hubo is Drexel University, but the team is really a collaboration between nine institutions and the Korea Advanced Institute of Science and Technology (KAIST), which built the Hubo hardware. The latest version of Hubo was built specifically for the competition.

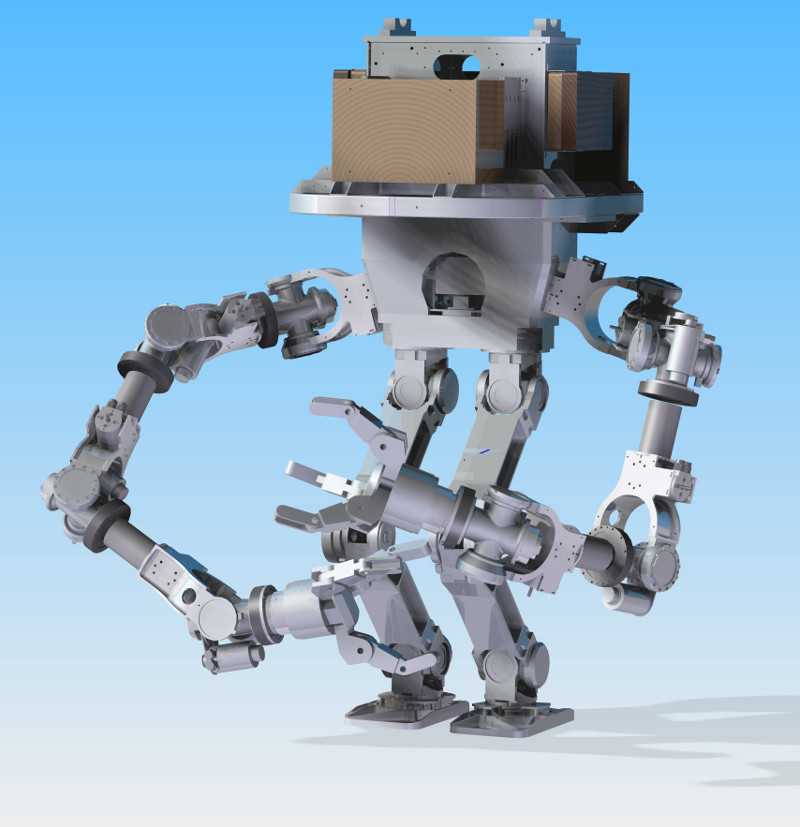
RoboSimian from NASA’s Jet Propulsion Lab
RoboSimian uses elements from JPL’s ATHLETE and Lemur robots, its first-place DARPA ARM-S team, and Stanford’s selectively compliant DARPA ARM-H design. According to its creators, its unique design uses multiple points of contact increase stability and allows RoboSimian to reverse direction without reorienting itself. (In the photo below, its hands have not yet been attached.)

NASA’s Johnson Space Center
Little has been revealed about the entry from Johnson Space Center other than that it will utilize technology developed for its Robonaut program and the X1 robotic exoskeleton.

SCHAFT Inc.
SCHAFT Inc. is creating a bipedal platform based on its existing HRP-2 robot. SCHAFT is a 2012 spin-out from the JSK Laboratory of the University of Tokyo.
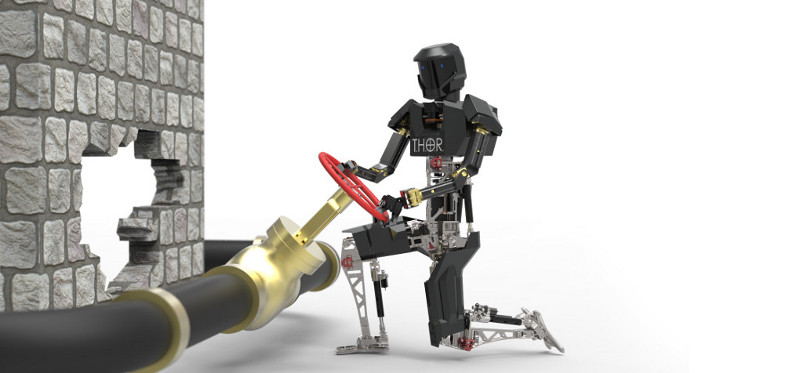
T.H.O.R. from RoMeLa at Virginia Tech
Like the Hubo entry, T.H.O.R. (Tactical Hazardous Operations Robot) is a collaboration between several partners, led by the Robotics & Mechanisms Laboratory at Virginia Tech. The other contributors include GRASP Lab at the University of Pennsylvania, Harris Corporation and Robotis.
Below is a video from DARPA with a brief introduction to each robot.
[ photos courtesy of DARPA, Carnegie Mellon University, KAIST, NASA, SCHAFT Inc. and Virginia Tech ]

New site invites STEM students to tackle Air Force challenges

Polaris provides wheels for DARPA Robotics Challenge

Report: Military UGV demand to shrink now, grow long-term
About The Author
Mike Davin
Mike Davin is passionate about business and robotics. In addition to editing The Business of Robotics, he is on the advisory board for the Robotics Alley Conference & Expo. He also serves on the executive committee of AUVSI Twin Cities as communications chair. Before he covered robots, he was senior editor of Boating Industry magazine as well as online editor of its sister publication, Powersports Business.